저번 글에서 stability의 정의와 stability를 판정하는 방법에 대해서 공부했습니다. 그 연장선으로 stability를 판정하는 Lyapunov's Direct Method에 대해서 배우려고 합니다.
그러기 위해서는 몇 가지 기본 개념들을 알고 가야 하기 때문에 이번 글에서는 Positive definite 개념과 그 외의 필요한 수학적 개념들에 대해서 짚고 넘어가겠습니다.
사실 positive definite이라고 하면 positive definite matrix를 먼저 떠올리실 수도 있지만, 여기서는 함수로 먼저 접근하고(모든 시스템이 matrix로 접근할 수 있는 것은 아닙니다. 즉, nonlinear 시스템도 고려해야 합니다.) 나중에는 LTI system 관점에서 볼 것입니다.
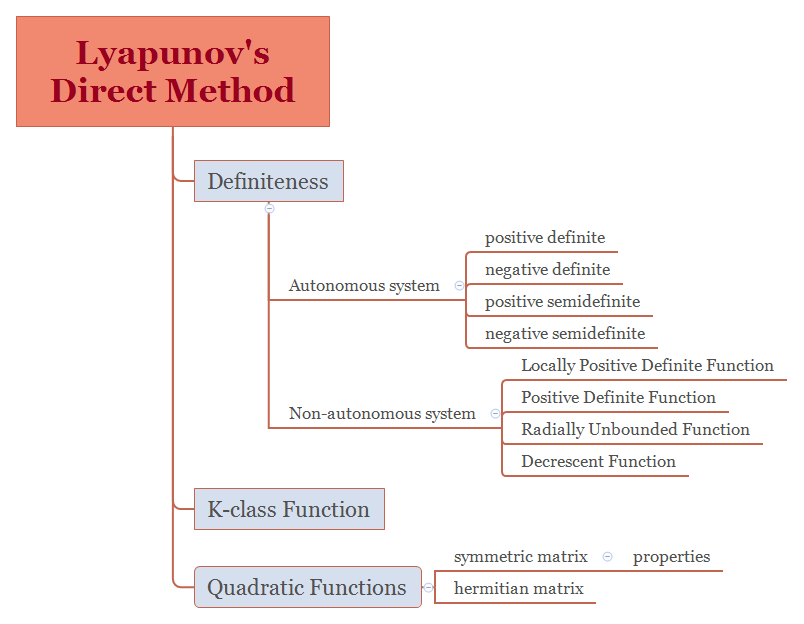
1. Definiteness
# Autonomous system
Autonomous system은 state profile이 시간에 무관한 시스템입니다.
일반적인 시스템의 표현이 $\dot{x}=f(t,x)$라면 autonomous system은 $\dot{x}=f(x)$라고 표현할 수 있습니다.
Autonomous system에서 $V(x)$라는 function이 있을 때,
1) $\text{If }V(x)>0\text{ for }x\neq 0\text{ and }V(0)=0, V(x)\text{ is positive definite}$
2) $\text{If }V(x)<0\text{ for }x\neq 0\text{ and }V(0)=0, V(x)\text{ is negative definite}$
3) $\text{If }V(x)\geq 0\text{ for }x\neq 0\text{ and }V(0)=0, V(x)\text{ is positive semidefinite}$
4) $\text{If }V(x)\leq 0\text{ for }x\neq 0\text{ and }V(0)=0, V(x)\text{ is negative semidefinite}$
5) $\text{If }V(x)\text{ is positive definite, then }-V(x)\text{ is negative definite}$
positive definite라는 것은 원점을 제외한 모든 x에서 0보다 크다는 것입니다.
positive semidefinite은 positivie definite보다 조건이 완화된 것으로 원점을 제외한 모든 x에서 0보다 크거나 같으면 됩니다.
둘 다 원점에서는 0이라는 사실을 기억해야 합니다.
negative definite, negative semidefinite는 positive definite, positive semidefinite와 부호만 반대인 것이므로 쉽게 이해할 수 있습니다.
$V(x)=x^{2}$과 같은 함수가 positive definite function이라고 할 수 있습니다.
# Non-autonomous system
위에서 autonomous systme을 설명한 것을 떠올려보면, 시간에 관계없는 시스템이었습니다. 반대로 non-autonomous system(아마 정확한 이름은 아닐 수 있습니다.)을 생각해보면, 시간에 dependent한 시스템이라고 생각할 수 있씁니다.
non-autonomous의 definiteness를 따지기 전에 알아야 하는 개념이 있습니다.
바로 위의 마인드맵에도 있는 K-class Function입니다.
-
Definition of K-class Function
찾아보니 Class $\kappa$(Kappa) Function이라고 부르기도 합니다.
A continous function $\alpha : R_{+}\rightarrow R_{+}$ is said to a K-class funtion if,
1. $\alpha(0)=0$
2. $\alpha$ is non-decreasing
3. $\alpha(p)>0\text{ whenever }p>0$
위의 조건을 보면, K-class function은 원점에서 시작해서 0보다 큰 구간(어차피 domain이 양수인 공간이므로 0을 제외한 모든 점)에서 0보다 크면서 감소하지 않는 함수를 말합니다.
다음과 같은 K-class function에 대한 정의를 가지고 Definition을 다뤄보겠습니다.
-
Locally Positive Definite Function
$\text{A continous function }V:R_{+}\times R^{n}\rightarrow R_{+}\text{ is said to be a }\textbf{Locally Positive Definite Function(LPDF)}$
$\text{if there exists a K-class function }\alpha : R_{+}\rightarrow R_{+}\text{ such that}$
1. $V(t,x)\geq \alpha(|x|)\text{ for all }t\geq 0 \text{ and for all }|x| \leq r\text{ for some }r>0$
2. $V(t,0)=0$
모든 t에 대하여, 특정 x값 범위 내에서 (어떤) K-class 함수보다 크거나 같고, 항상 원점을 지날 때 이 함수 $V(t,x)$를 Locally positive definite function이라고 합니다.
K-class 함수는 특정 함수로 특정한 것이 아니라, k-class function의 조건을 만족시키는 어떤 함수가 존재하기만 하면 됩니다.
-
Positive Definite Function
$\text{A continous function }V:R_{+}\times R^{n}\rightarrow R_{+}\text{ is said to be a }\textbf{Positive Definite Function(PDF)}$
$\text{if there exists a K-class function }\alpha : R_{+}\rightarrow R_{+}\text{ such that}$
1. $V(t,x)\geq \alpha(|x|)\text{ for all }t\geq 0 \text{ and for all }x\in R^{n}$
2. $\lim_{p\rightarrow\infty} \alpha(p)=\infty$
3. $V(t,0)=0$
모든 t에 대하여 K-class 함수보다 크거나 같고, 항상 원점을 지나며, $|x|\rightarrow \infty$일 때 무한대로 가는 함수 $V(t,x)$를 positive definite function이라고 합니다.
LPDF와는 x의 범위에서 차이가 납니다. LPDF는 특정 x값보다 작은 선에서 PDF를 만족하면 되기 때문에, x가 무한대로 갈 때 함수 값도 무한대로 갈 필요가 없습니다.
note : 앞에서 본 autonomous system에 비해 너무 strict한 조건인 것 같아서 찾아보니
- Positive semidefinite Function
1. $V(t,0)=0$ $\forall t$
2. $V(t,x)\geq 0$ $\forall t \text{ and }x$
이제 definiteness를 정의했으니 다른 함수 성질에 대한 개념을 알아보겠습니다.
-
Radially Unbounded Function
$\text{A function V(t,x), defined in half space }t\geq t_{0}\text{is called }\textbf{radially unbounded }$
$\text{is for each }\alpha>0\text{ there is a }\beta>0\text{ such that }V(t,x)>\alpha\text{ whenever }|x|>\beta.$
'Radially unbounded'의 정의는 곧 V(t,x)가 무한대로 커지고 있다는 의미입니다.
즉, $V(t,x)\rightarrow \infty \text{ as } |x|\rightarrow\infty$
그런 의미에서 $V(x)=\frac{x_{1}^{2}}{1+x_{1}^{2}}+x_{2}^{2}$는 radially unbounded가 아닙니다.
$x_{1}\rightarrow \infty, x_{2}=0$일 때, $|x|\rightarrow \infty$인데, $V(t,x)\rightarrow 1$으로 수렴하기 때문입니다.
또 다른 예시로, $V(t,x)=(x_{1}^{2}+x_{2}^{2})e^{-t}$가 있다고 하겠습니다. 위의 예시와 다르게 non-autonomous system입니다.
이 함수 역시 radially unbounded라고 말할 수 없는데요, 그 이유는 $t\rightarrow \infty$일 때 $V\rightarrow 0$이기 때문입니다. 시간에 대한 영향도 고려해야 합니다. 정의에서도 언급한 것처럼 $t\geq t_{0}$일 때 모두 성립해야 하기 때문입니다.
-
Decrescent Function
$\text{A continous function }V: R_{+}\times R^{n}\rightarrow R_{+}\text{ is said to be decrescent}$
$\text{if there exists a K-class function }\beta : R_{+}\rightarrow R_{+} \text{ such that}$
1. $V(t,x)\leq \beta(|x|) \text{ which is independent of t for all }t\geq 0 \text{ and for all }|x|\leq r\text{, for some }r>0$
이 말은 곧, $|x|<r$일 때 upper bound가 있다는 뜻이고, 곧
$\lim V(t,x)=0 \text{ for }|x|\rightarrow 0$이 성립한다는 뜻입니다. 물론 모든 t에 다 적용될 수 있어야 합니다.
지금까지 함수들의 성질에 관해서 알아보았는데, 함수의 boundness와 stability는 여러모로 관계가 있다보니 이렇게 개념을 짚고 넘어가는 것 같습니다.
다음 글에서는 Quadratic form과 symmetric matrix에 대해 다루겠습니다.
'연구 Research > 제어 Control' 카테고리의 다른 글
| [고등자동제어] Lyapunov's Direct Method (3) - Lyapunov function (0) | 2021.01.23 |
|---|---|
| [고등자동제어] Lyapunov's Direct Method (2) - Quadratic function (0) | 2021.01.23 |
| [고등자동제어] Stability in the sense of Lyapunov (3) (0) | 2021.01.15 |
| [고등자동제어] Stability in the sense of Lyapunov (2) (1) | 2021.01.07 |
| [고등자동제어] Stability in the sense of Lyapunov (1) (0) | 2021.01.07 |