[제어] MATLAB을 활용한 Realization
·
연구 Research/제어 Control
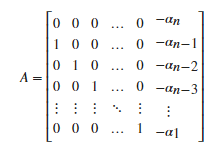
이 글을 읽기 전에 참고하면 좋은 글 : https://normal-engineer.tistory.com/214 [제어] Realization에 대한 고찰 이전 글에서 transfer function을 canonical form으로 바꾸는 것, 즉, realization에 대해서 공부를 했었다. 이전 글 : https://normal-engineer.tistory.com/25 [고등자동제어] State space와 transfer function.. normal-engineer.tistory.com MATLAB canon 활용법 MATLAB에서는 Transfer function을 canonical form으로 바꿔주는 함수인 canon이 있다.이 함수를 쓰면 canonical form으로 쉽게 바꿔주지만..




